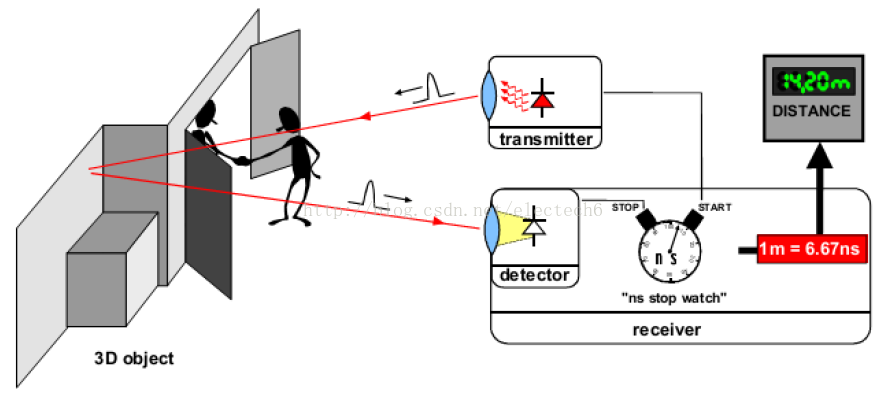
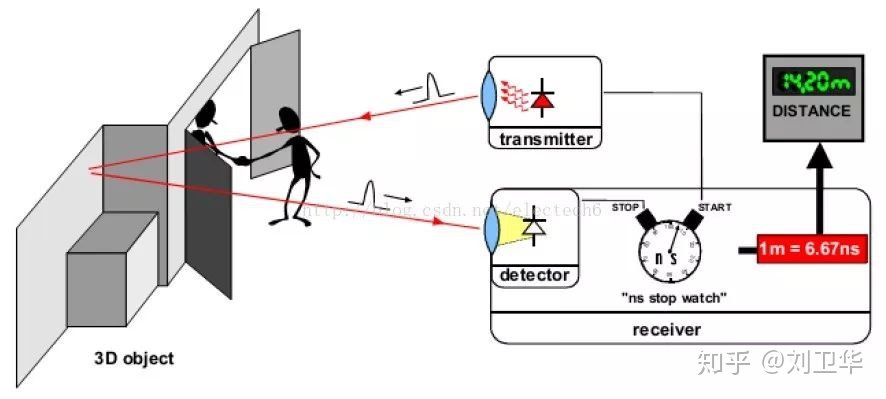
TOF ranging basics
The main difficulties in implementing TOF radar are:
1. The first is the timing issue. In the TOF scheme, distance measurement relies on time measurement. But the speed of light is too fast, so to obtain accurate distances, the requirements for the timing system become very high. One data is that lidar needs to measure a distance of 1cm, and the corresponding time span is about 65ps. Students who are slightly familiar with electrical characteristics should know what this means for the circuit system.
2. Next is the processing of pulse signals. There are two parts here:
a) One is laser: There are almost no requirements for laser driving in triangular radar, because the measurement relies on the position of the laser echo, so only one continuous light emission is required. But TOF is not good. It not only requires pulsed laser, but also the quality should not be too bad. At present, the pulse width of the outgoing light of TOF radar is about a few nanoseconds, and the rising edge is required to be as fast as possible. Therefore, the laser drive solution of each product is There are also high and low levels.
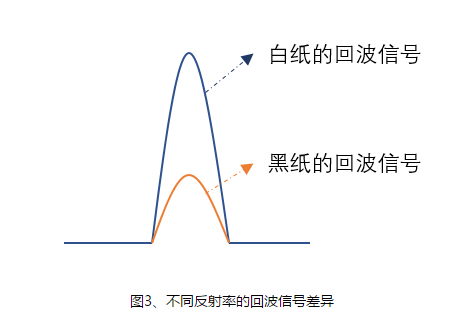
b) The other is for the receiver. Generally speaking, the echo time identification is actually the time identification of the rising edge. Therefore, when processing the echo signal, it is necessary to ensure that the signal is not distorted as much as possible. In addition, even if the signal is not distorted, since the echo signal cannot be an ideal square wave, the measurement of different objects at the same distance will also lead to changes in the leading edge. For example, when measuring white paper and black paper at the same position, two echo signals as shown below may be obtained, and the time measurement system must measure that the two front edges are at the same time (because the distance is the same distance), which requires Special handling.
In addition, the receiving end also faces problems such as signal saturation and noise floor processing, which can be said to be full of difficulties.
Intelligent Recommendation

TOF camera
Due to the lack of practical applications of TOF camera products, in addition to Apple and Honor mobile phones, mobile terminals will unanimously abandon TOF camera products on cameras in 2022, except...
Time-of-Flight Method (TOF)
This article has been published in the individualWeChatPublic number:Computer vision life(We chat numberCV_life)Welcome to pay attention! Depth cameras differ according to the principle of depth measu...
【Positioning】TOF and TDOA
Unlike Bluetooth and WIFI positioning methods, UWB technology location information is not calculated based on signal strength (RSSI), but through the precise wireless signal transmission time and rece...

Application of TFmini (TOF) on stm32
Using TFmini is to use serial communication, communicate with STM32F103ZET6, and display on the LCD at the same time. Communication protocol uses factory preset TFmini data output uses standard data o...
Ubuntu Balser TOF
On a new computer, you want to test the TOF camera of BASLER, after installing the SDK of TOF (I also installed pylon5 on this computer), compiling your own program found that the following error: Bas...
More Recommendation
[Positioning] TOF and TDOA
Unlike the Bluetooth and WiFi positioning methods, the UWB technology location information is not based on signal strength (RSSI), but is calculated by the time, reception time, and by the algorithm b...

Full interpretation of ToF technology
Article directory Full interpretation of ToF technology 1. What is ToF 2. The principle of ToF 3. ToF advantages and disadvantages Full interpretation of ToF technology 1. What is ToF ToF: Time of fli...

Structured Light and TOF
(monocular, binocular, structured light, TOF, lidar, sonar) The technologies currently used for depth estimation mainly include binocular depth estimation (in order to improve accuracy, Tesla’s ...
TOF and Structured Light
Article Directory TOF and Structured Light 1. ToF 2. Structural Light 3. Comparison of measurement distance, resolution, and development cycle TOF and Structured Light 1. ToF ToF (Time of Flight) Flig...
Read part of the paper ISSCC TOF
Today read papers:A 1200×900 6μm 450fps Geiger-Mode Vertical Avalanche Photodiodes CMOS Image Sensor for a 250m Time-of-Flight Ranging System Using Direct-Indirect-Mixed Frame Synthesis with ...