Preliminary learning of ROS---turtlebot robot platform installation
tags: ros robot navigation
Now I am enrolled in graduate school and I am exposed to the service robot project. I am mainly responsible for the navigation part, including positioning, composition and path planning. Record the learning process now to facilitate future learning records and urge yourself at the same time.
Turtlebot is considered a robot platform. It is composed of create or kuboki and kinect or XTion.
First install turtlebot, we use source to install.
Install the following commands in order (> is $, don’t copy it)
1> sudo apt-get install python-rosdep python-wstool ros-indigo-ros
2> sudo rosdep init
3> rosdep updateThe above is preparatory work. Basically, ROS has been installed before.
Creating a workspace is a bit like creating a catkin workspace. Pay attention to do it one by one.
mkdir ~/rocon
cd ~/rocon
wstool init -j5 src https://raw.github.com/robotics-in-concert/rocon/release/indigo/rocon.rosinstall
source /opt/ros/indigo/setup.bash
rosdep install –from-paths src -i -y
catkin_makemkdir ~/kobuki
cd ~/kobuki
wstool init src -j5 https://raw.github.com/yujinrobot/yujin_tools/master/rosinstalls/indigo/kobuki.rosinstall
source ~/rocon/devel/setup.bash
rosdep install –from-paths src -i -y
catkin_makemkdir ~/turtlebot
cd ~/turtlebot
wstool init src -j5 https://raw.github.com/yujinrobot/yujin_tools/master/rosinstalls/indigo/turtlebot.rosinstall
source ~/kobuki/devel/setup.bash
rosdep install –from-paths src -i -y
catkin_make
1> . ~/turtlebot/devel/setup.bash
2> rosrun kobuki_ftdi create_udev_rules
3> echo "source ~/turtlebot/devel/setup.bash" >> ~/.bashrcAfter everything is done, there will be three more folders, kuboki, rocon, and turtlebot. Under each folder are three folders, src, devel, and build.
Intelligent Recommendation
Robot operating system (ROS) online training platform learning experiment guide
Robot Operating System (ROS) Online Learning Guide I have accumulated more than one year of experience in setting up ROS-related courses in colleges and universities. Since the course arrangement of a...
Installation ROS Kinetic turtlebot + Gazebo and the simulation and the Ubuntu16.04 turtlebot built FIG gmapping
Corresponding to first install ROS Kinetic Ubuntu16.04Reference links: Chi-made maker cultureIn fact, the official website is translated a bit ... Then install turtlebot, only 14.04 version of the off...

ROS robot 001-ROS installation
First, you need to install the ROS system on Ubuntu 16.04: 1. Add ROS source 2. Add key 3. Install ROS 4. Initialize rosdep 5. Set environment variables 6. Install rosinstall Check if the installation...
NVIDIA TX1 installation ubuntu16.04lts + ros Kinetic version + Turtlebot Complete
First, statement, this blog is the experience of the NVIDIA TX1 installation. It is also searching for many big gods online during the installation process. This arti...
Ros Kinetic + Ubuntu16.04 + TurtleBot Source Machine Installation Tutorial
Use the ROS frame, take Turtlebot2 to practice, so as not to miss the next omission to forget the application method: -2017.06.15 music Rocon installation 1. Open the terminal to type the command: mkd...
More Recommendation

ROS robot learning -ROS foundation
ROS robot learning -ROS foundation ROS system structure Node (node): software module Node Manager (Ros Master): Control Center, providing parameter management Top (Topic): asynchronous communication m...
ROS: Robot Software Platform (1)
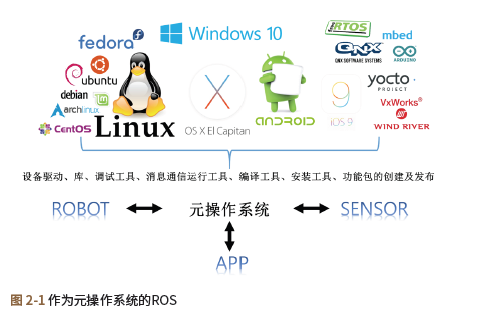
ROS: Robot Software Platform (1) introduction Introduction to ROS "ROS is an open source robot meta-operating system. It provides the services we expect from the operating system, including hardw...
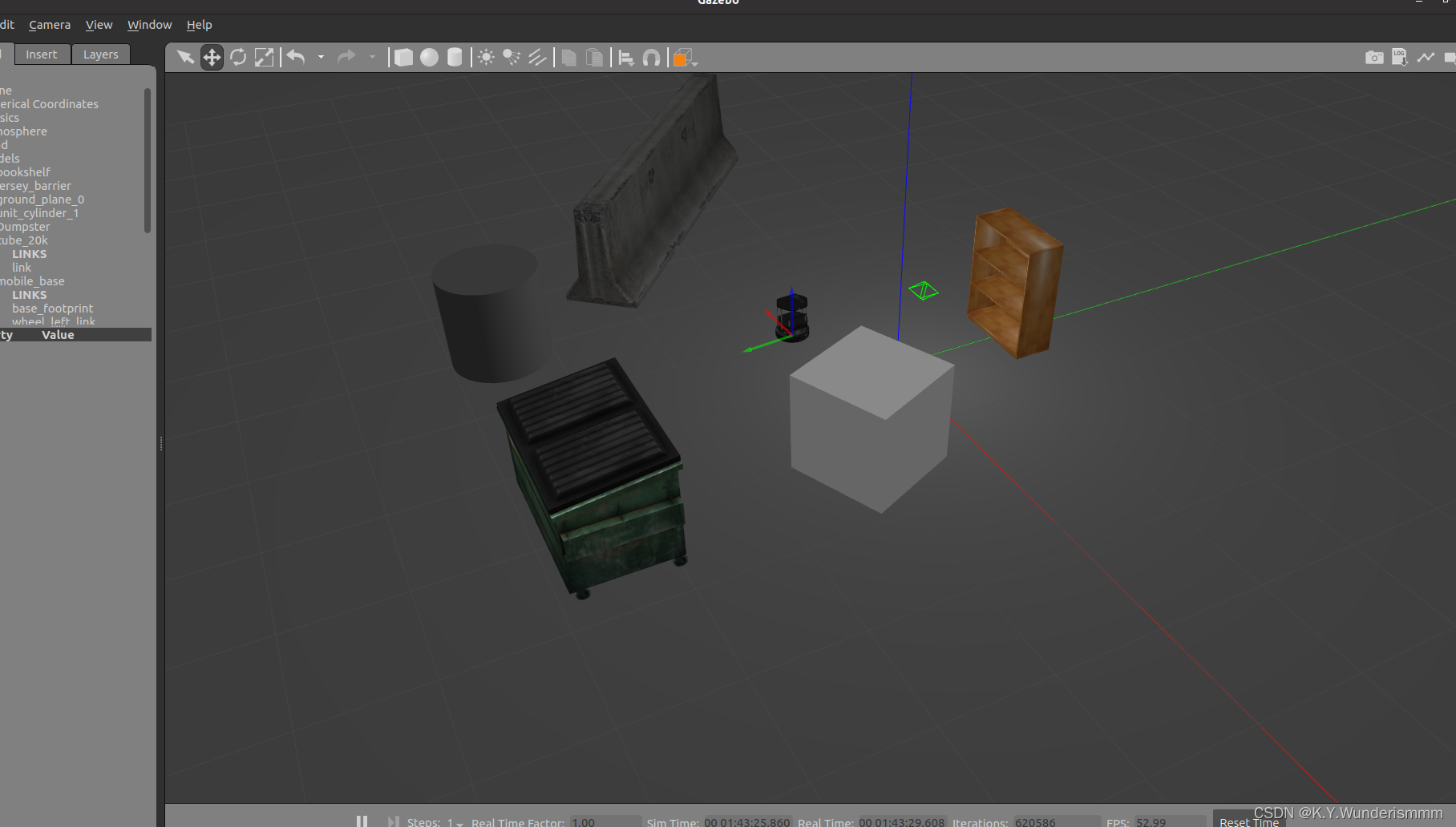
Archaeological ROS TURTLEBOT simulation
Learn ROS-Turtlebot simulation turtlebot Simple preparation start up Configure RVIr Remember to remember to do SLAM after you finish it Move her to take her around turtlebot It is an existing hardware...
Pioneer Robot ROS Getting Started - rosaria installation, testing and learning
Pioneer Robot ROS Getting Started - rosaria installation, testing and learning 1. Install MobileSim 2. Install rosaria 2.1 first establish a workspace 2.2clone ROSARIA to the workspace 2.3 Download an...

ROS Learning (21) Robot SLAM function package -installation and testing of ORBSLAM
Articles directory Foreword 1. Install pangolin Second, compile orB-SLAM2 Third, dataset test Foreword In the previous study, we completed the installation and test of RGDBSLAM. Based on this article,...