amcl algorithm problem
tags: CSDN ROS Navigation
amcl understanding
Foreword

text

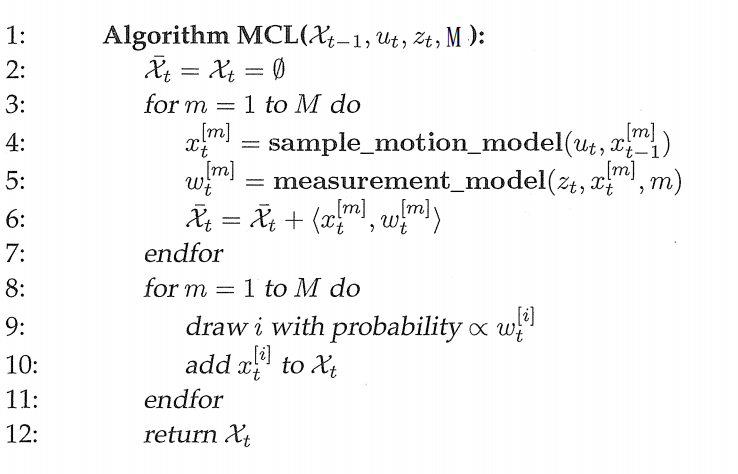
(1) The difference between MCL algorithm and AMCL algorithm:
AMCL algorithm increases the short-term and long-term exponential filter attenuation rateαslow,αfast, in other words in MCLαslow,αfast is 0, and AMCL is not 0.

(2) The meaning of the four parameters
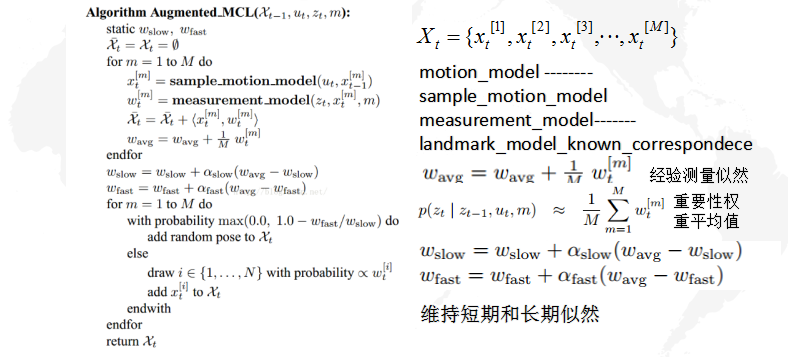
(3) Xt represents the set of M particles. Line 5 uses the motion model to obtain new poses from old particle sampling. Line 6 its importance weight is set according to the measurement model.

(4) The most important place in AMCL is the random sampling probability. (Look at the picture)

(5) motion_model uses sample_motion_model_velocity in Chapter 5 of the book "Probability Robot"

(6) The role of each parameter,

(7)measurement_model uses Chapter 6 of the book Probabilistic Robot landmark_model_known_correspondece

(8) The role of each part of the algorithm, and the input and output of the algorithm
Positioning display


During the first mark detection, almost all particles are extracted according to this detection, as shown in the figureb shown. This step corresponds to the case where the short-term average of the measured probability is smaller than the long-term average of the measured probability.After multiple inspections, the particles are tightly wrapped around the early realityAround the robot, liked, and the short-term and long-term likelihood averages will increase. In this positioning stage, the robot is just trackingIts location, the observation likelihood is quite high, and only occasionally a small number of random particles are added.
When the robot is placed in another position, the measurement probability decreases. At this new location, the first mark detection has not triggered any additional particles because the smooth estimateWfast is still very high (e), After several marker tests at the new location,Wfast drops faster than Wslow, and more random particles are added (f, g). Finally, the robot positioning is successful.
Intelligent Recommendation
ROS Navigation-----amcl node.cpp
Main function The main function of the main function is: Define a signal variable, manage the node Define the amclNode object 2. Construction of the amclNode object 1. There is a configuration related...
amcl source Interpretation
The first is the main function, the first step in the initialization operation of the conventional node amcl ros and instantiated. The second step uses the signal function: first parameter signal func...
Particle Filter AMCL
Outline Particle filter, i.e. Particle Filter, abbreviated PF. is placed in all the positioning program event data received laser sensor, a laser radar whether each received data, will determine what ...

amcl first look
Reprinted: About amcl The full name of amcl in English is adaptive Monte Carlo localization, which is actually an upgraded version of the Monte Carlo positioning method. The adaptive KLD method is use...
AMCL parameter description
translation AMCL introduction and parameter description 2017-03-17 17:09:52 Forrest-Z Reading 7040More Category column: ROS Package summary amcl is a probabilistic positioning system for robots to mov...
More Recommendation

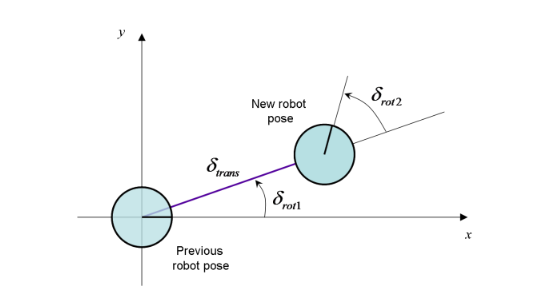
amcl motion model
Odometer sport model Differential robot motion is decomposed into rotation, translation, and rotation. Define the Cartesian coordinate system, the right is the positive direction of the x axis, and th...

Run amcl on Pioneer3at
AMCL is a probabilistic positioning system for robots during two-dimensional movement. It uses adaptive Monte Carlo localization (or KLD sampling) and uses a particle filter to track the pose of the r...
Odom data processing in AMCL
Recently, I was watching the program of AMCL. I want to know how the configuration parameters of odom in the launch file operate. After reading it, make some notes. 1. AMCL's launch file about ...
ROS AMCL positioning
AMCL positioning is one of the more commonly used positioning methods in ROS. The specific principles are detailed in Chapter 8 of "Probability Robots". Here we only briefly record the probl...

Robot positioning (amcl) and navigation
Robot positioning (amcl) and navigation Description Simulation of positioning and navigation based on the successful construction of the map by gmapping amcl is a probabilistic positioning system in a...