Laser navigation slam based indoor navigation robot under the ros platform (1)
The first one: first slap
what's this
To put it simply, we have to be a robot that can build an indoor map. After we have given a target point, we can make a path plan based on the map and then navigate autonomously, that is, we will run to that point.
Why do I have to do this thing?
Because the design is to do this, simply write a blog to defraud points
Framework introduction
First of all, we know that robots are called robots not because they look like humans, but because they can imitate certain behaviors of human beings. Like the robots made this time, it can imitate the movement of people, such as we humans from one Move the point to another point, we will try to calculate an optimal route, we will find a short route, we will avoid obstacles, we will try our best to plan within the scope we are familiar with, if, to a new place We will tentatively explore new paths. Rather than rampaging.
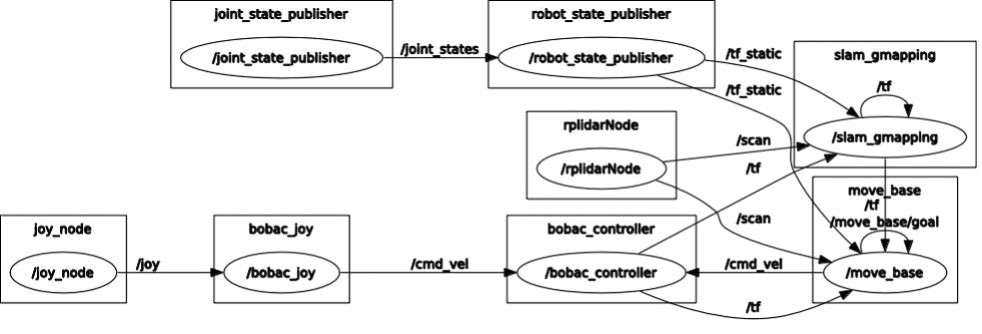
From the above figure we can see that the robot is mainly divided into two parts: thinking + moving
Thinking
The thinking of the robot is that the robot makes decisions, how to plan the path, how to calculate the optimal solution, and the white is the brain of the robot. Generally, we will select a computer with strong computing power to handle this part of the work. In most cases, this simple robot is enough to use the Raspberry Pi, simple and affordable, most of the entry-level robots on the market are also using the Raspberry Pi, but this time I use miniPC, why not use the Raspberry Pi Because, because of the money and willfulness (teacher has money), but the steps in the development of the Raspberry Pi is basically the same, I tried, I will not lie to you.

The picture above is the PC I used this time, a Gigabyte miniPC.
mobile
The movement of the robot is very well understood. Because the chassis control has very high real-time requirements, but the calculation amount is not particularly large, so the microcontroller is generally used as the control center of the chassis. I used the STM32F407ZGT6 as the master for the chassis driver board. The board is for the lab teacher to help me draw, and I haven't done it yet. I will send it out when I am done. The chassis uses a four-wheeled Mecanum wheel chassis, which may be very strange to many people. Let me take a picture first.

It is obvious that this kind of wheel is very special. If the chassis adopts this kind of wheel, it can be translated. It looks more beautiful. Of course, this kind of wheel is more expensive. You can also change it to ordinary. The wheel, only the host computer needs to modify the parameters slightly.
If I use a motor, I use a very common DC brush motor.

This motor comes with an encoder, which is cheap and easy to control.
List a list
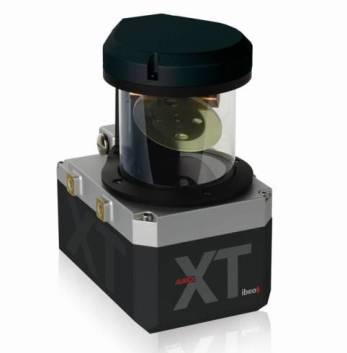
Radar: A2 * 1 of Siwei Technology
Host computer: Gigabyte's miniPC * 1
Chassis structure: Acrylic structure * 1
Motor: DC brush motor * 4
Wheel: Mecanum Wheel * 4
Motor drive module: tb6612 * 2
Imu module: mpu9250 * 1
Power: robomaster 24V power supply from the lab * 1
Buck module: 24V to 19V * 1; 24V to 12V * 1; 12V to 5V * 1;
Chassis driver board components: (STM32 chip, etc.)
At last
Since the chassis driver board is not ready yet, so write so much first, explain the structure of the robot, and as the development progresses, I will slowly improve the entire construction process.
Intelligent Recommendation
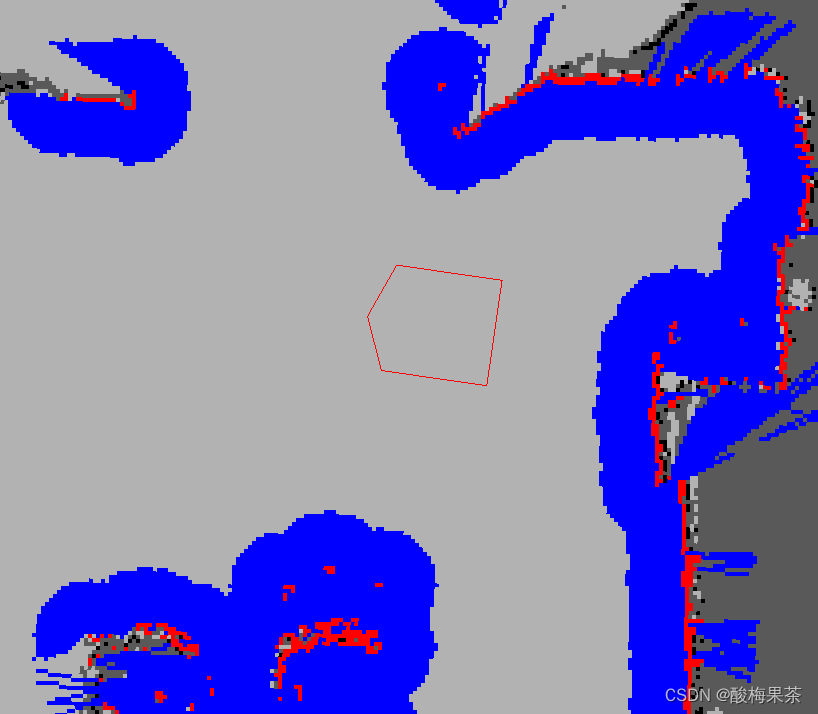
Indoor ROS robot navigation debugging record (experience in selecting expansion radius)
1. Map Layers Note: In the above figure, the red part represents the obstacle in the cost map, the blue part represents the obstacle in the incision radius of the robot, and the red polygon represents...
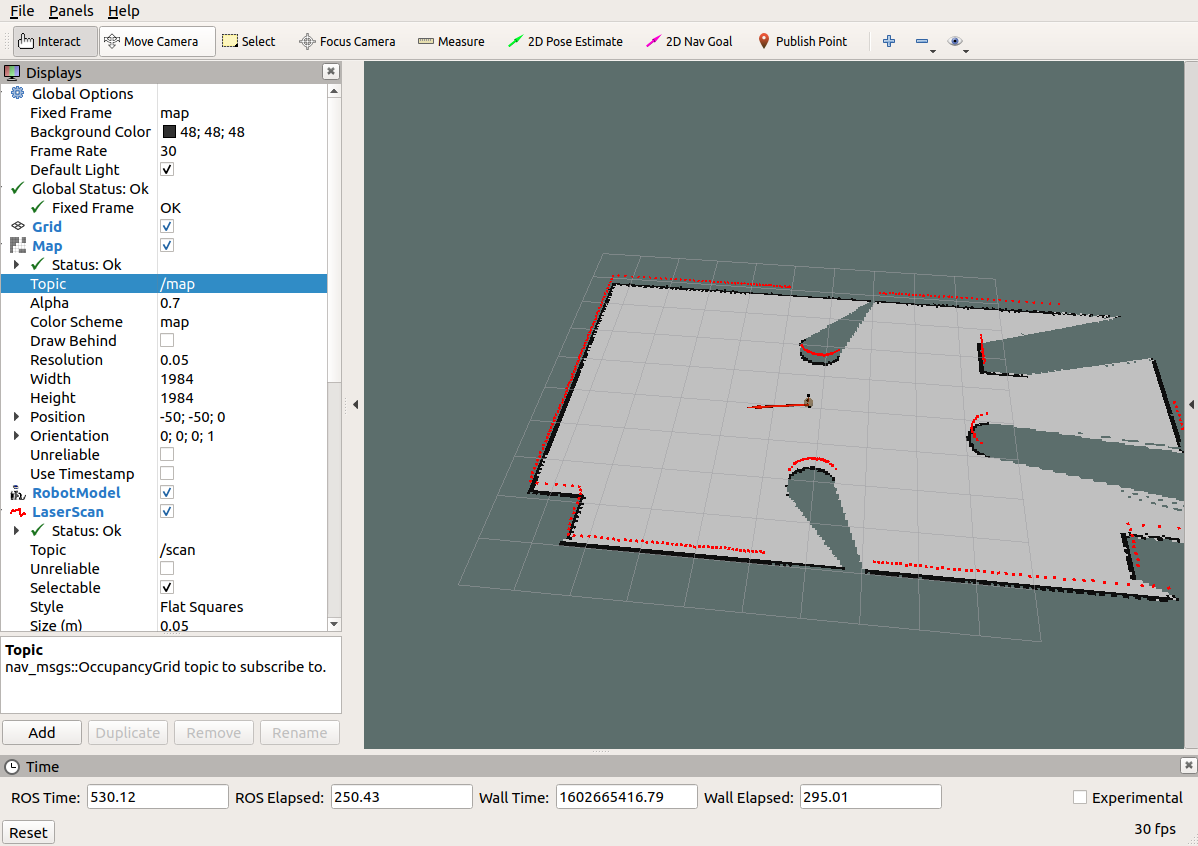
ROS learning [13]-----Learn to use gmapping and hector_slam in the SLAM function package in ROS, complete the indoor navigation simulation with lidar robot, and save the map created by the robot (pgm)
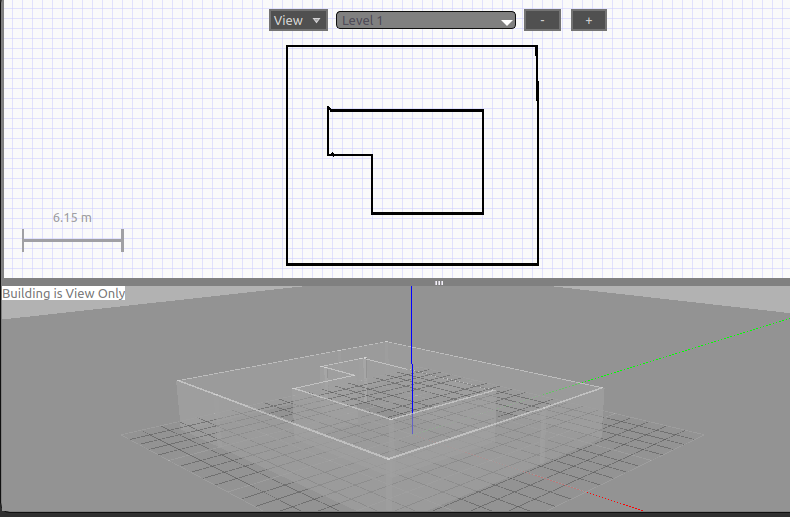
ROS learning [13]-----Use gmapping and hector_slam in the SLAM function package in ROS to complete the navigation map simulation directory of the radar robot 1. Use gazebo to create an indoor closed e...
Robot SLAM and autonomous navigation (1)-theoretical basis
Robot SLAM and autonomous navigation (1)-theoretical basis table of Contents Overview 1. Lidar 2. Camera 3. RGB-D camera Overview SLAM can be described as: the robot starts to move from an unknown loc...
Robot navigation (simulation) (1) - SLAM construction
Navigation implementation 01_slam construction map Reference video:[Ottology] ROS robot entry courses "ROS Theory and Practice" zero-based tutorial _ _Bilibili Reference documentation:http:/...
(1) Robot SLAM and Autonomous Navigation - Environmental Construction
(1) What is SLAM? Simply, SLAM is where GPS cannot be used, and the robot is positioned, the incremental map is built, and the autonomous positioning and navigation of robots. Just like a blind person...
More Recommendation
ROS-based slam map construction and navigation autonomous navigation
ROS-based slam map construction and navigation autonomous navigation One, slam map construction 1. Experimental principle 1.1 slam algorithm installation ros-indigo-slam-gmapping is one of the laser s...
ROS -based SLAM building map, automatic navigation, obstacle avoidance (Bingda robot)
SLAM is the abbreviation of Simultaneous Localization and MAPPING, which means "synchronous positioning and building maps", which is mainly used to solve the problem of positioning and map c...

SLAM+Voice Robot DIY Series: (6) SLAM Construction and Autonomous Obstacle Navigation——3.ros-navigation Robot Autonomous Obstacle Navigation...
SLAM+voice robot DIY series: (6) SLAM construction and autonomous obstacle avoidance navigation——3.ros-navigation robot autonomous obstacle avoidance navigation Summary Through the previou...
Mobile robot navigation simulation under ROS
Author: Intelligent Robot Laboratory, Hangzhou Dianzi University surroundings:ROS+Kinetic16.04 reference:<<ROS Robot Development Practice>>----Hu Chunxu Experimental steps Ready to work Bu...

ROS kinetic SLAM need to use robot navigation data
Hardware Requirements 1. Differential wheeled robots, may be used to control the speed command Twist linear: linear velocity of the XYZ directions, the unit is m / s; angular: angular velocity of the ...