Very recommended "talking about SLAM technology"
I have recently read two very good articles on SLAM technology, which is very helpful for understanding the history of SLAM technology, current research status and future prospects. Reprinted here! (click on the blue font)
Talking about SLAM technology (on)
Talking about SLAM technology (below)
With the popularity of robots, drones, driverless, and VR/AR in recent years, SLAM technology is well known and is considered one of the key technologies in these fields.
SLAM (Simultaneous Localization and Mapping), synchronous positioning and map construction, first proposed in the field of robots, it refers to: the robot starts from an unknown location of the unknown environment, and locates its position and posture through repeated observation of environmental characteristics during the movement. And then build an incremental map of the surrounding environment according to its own location, so as to achieve the purpose of simultaneous positioning and map construction. Due to the important academic value and application value of SLAM, it has always been considered as the key technology to realize fully autonomous mobile robots.
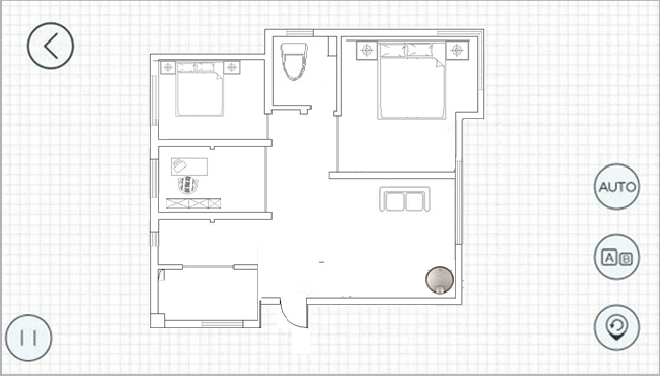
As the following picture, in general, SLAM answers two questions: "Where am I?" "What is it around me?" Just as people are in an unfamiliar environment, what SLAM tries to solve is to recover the observer itself and The relative spatial relationship of the surrounding environment, "Where am I?" corresponds to the positioning problem, and "what is around me" corresponds to the construction problem, giving a description of the surrounding environment. Answering these two questions, in fact, completed the spatial cognition of themselves and the surrounding environment. With this foundation, you can carry out path planning to reach the destination you want to go. In the process, you need to detect the obstacles encountered in time to ensure safe operation. "
 Figure from DSO
Figure from DSO
The contents include -
1. SLAM technology
2. Introduction to SLAM Development
(1) Development of Lidar SLAM
(2) Visual SLAM development
(3) Several representative SLAM systems in the development of visual SLAM
3. Key issues in the visual SLAM system
(1) Use of image information
(2) Data association
(3) Initialization
(4) pose estimation
(5) Map construction
(6) Relocation
(7) Loopback detection
4. DLAM implementation difficulties
5. The future of SLAM
(1) Multi-sensor fusion SLAM
(2) Semantic SLAM
Intelligent Recommendation

The second development control and quot
Direction of first, secondary development 1.1 Add class library 1.2 Add components in the class library 1.3 Add Form to reference and inherit the Text 1.4 Add a ErrorProvider control Write custom logi...
6. Method quot
6. Method quot When we use Lambda, if there is only one method in the method, there is only one method (including the constructed method), and we can use the method to reference to further simplify th...
[Reserved] SLAM technology which is about to subvert the field
what isSLAM? Robot in an unknown environment, to achieve intelligent required to complete three tasks, the first is positioning (Localization), and the second is the construction diagram (Mapping), th...
axis2 File "/axis2-web/listSingleService.jsp" not found
Check service.xml service name is correct...

Exception in thread "AWT-EventQueue-0" java.lang.NullPointerException
An exception occurred when adding a mouse listener events awt Swing project Exception in thread "AWT-EventQueue-0" java.lang.NullPointerException at day02.LoginFrame$MyAct...
More Recommendation
Spring Security There is no PasswordEncoder mapped for the id "null"
java.lang.IllegalArgumentException: There is no PasswordEncoder mapped for the id "null" at org.springframework.security.crypto.password.DelegatingPasswordEncoder$Unmapp...
django.template.exceptions.TemplateSyntaxError: '"myfilter"' is not a registered tag libra
Error may: 1. Create a new file in your templatetags app directory folder is defined as the package did not create __init__.py 2. issue written procedures Create a file in templatetags myfilter.py htm...
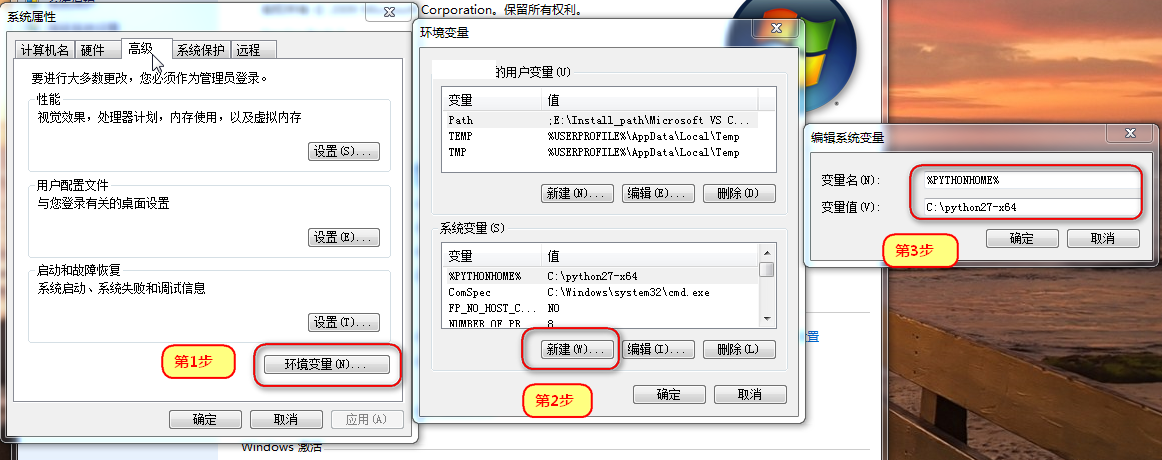
IDA 7.0 Python import "site" failed
The pit of my relatively long time, in order to prevent other people into the pit, on the timely write a blog to tell the others, in line withKnowledge and technology sharing principle. Because these ...
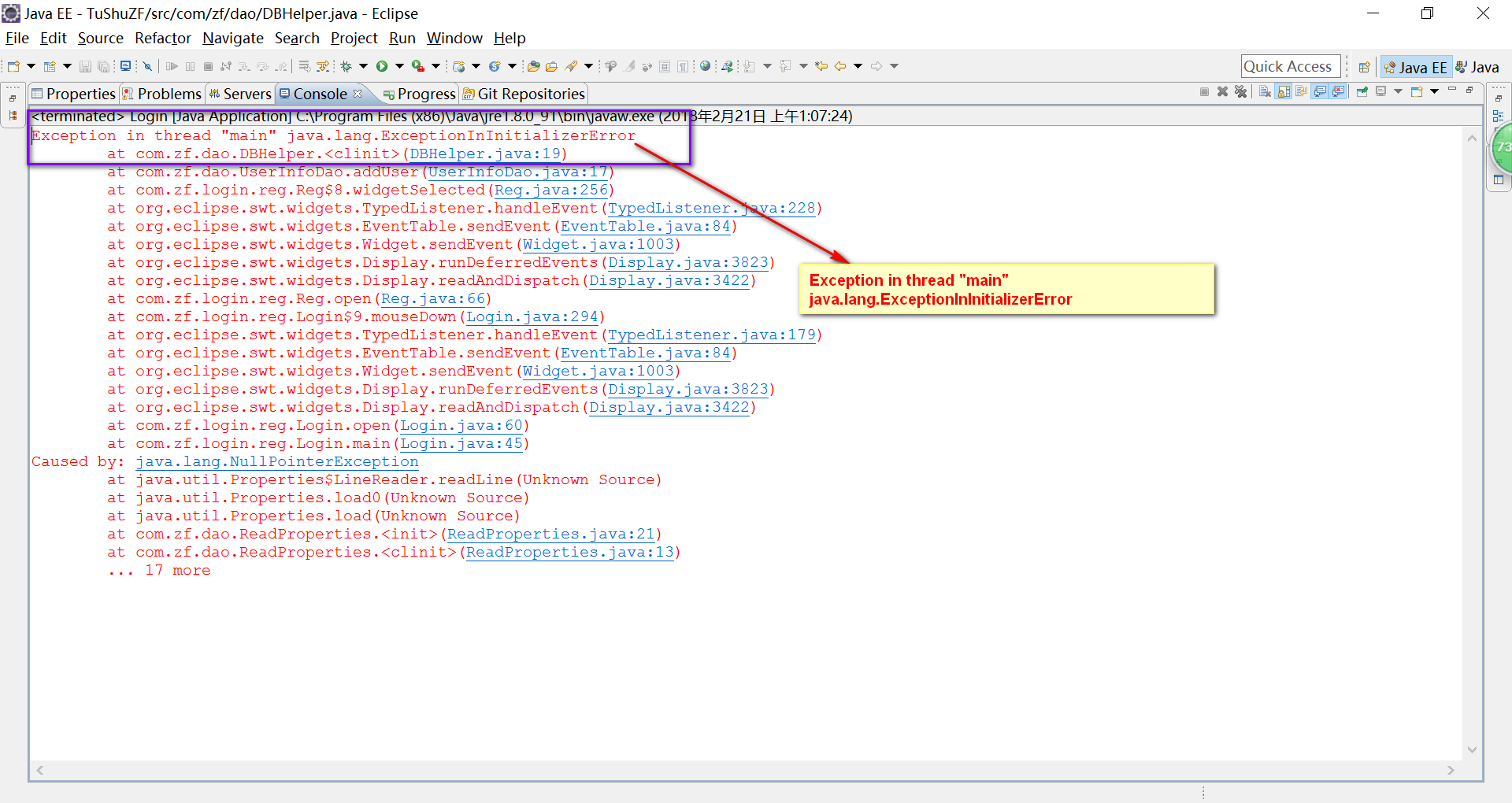
Exception in thread "main" java.lang.ExceptionInInitializerError
Exception in thread "main" java.lang.ExceptionInInitializerError. Today, the above error prompt abnormal main thread "Properties" when writing programs with DBHelper As shown below...

Exception in thread "main" java.lang.NoSuchMethodError:
1. The following error appears in the maven-jstorm project: 2. The reason is: the jar package required by jstrom is not installed Solution: downloadjstormSource package download link: https://github.c...