【AUTOSAR COM 1. Introduction to Communication Protocol Stack】
tags: # Intelligent driving (beginner) C language mcu autosar
Download link for CP AUTOSAR document
1. First, let’s look at the COM stack architecture diagram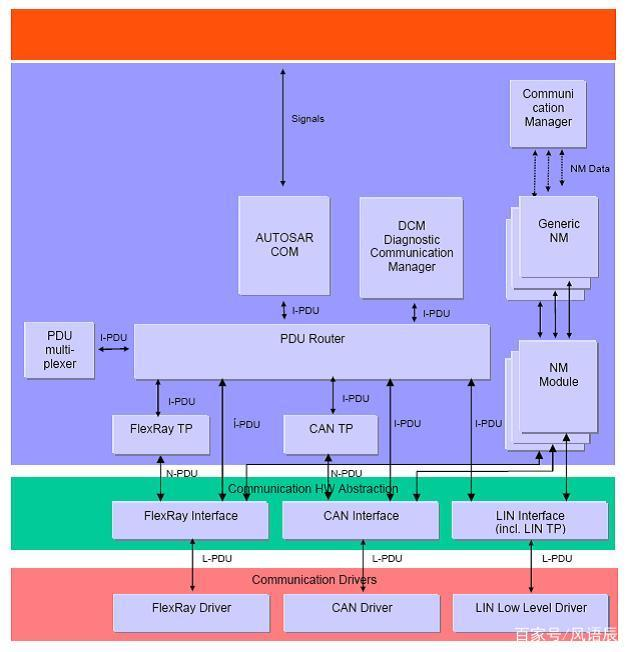
1 CAN communication protocol stack concept
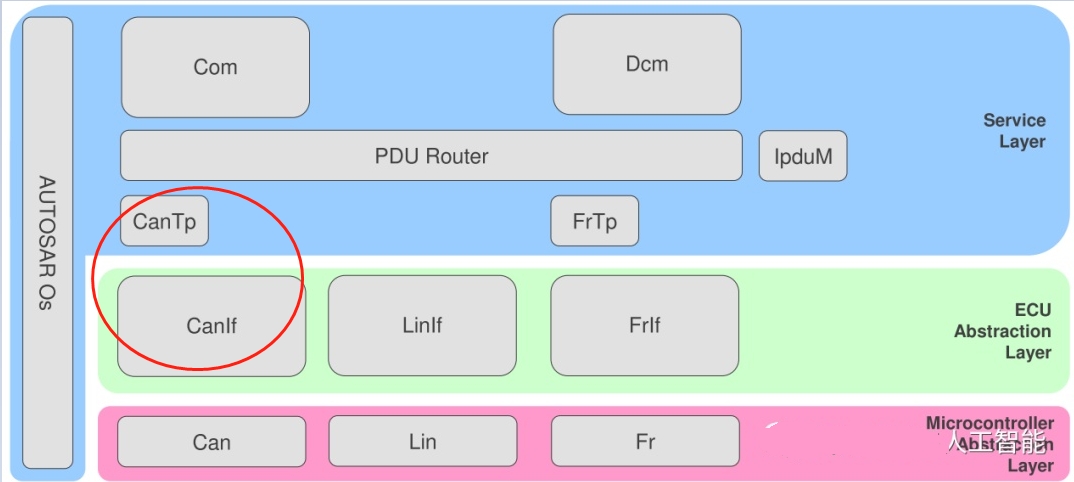
The AUTOSAR communication stack is located between the runtime environment (RTE) and the microcontroller abstraction layer (MCAL), which can simplify communication services between ECUs and enable data interaction between different types or rate buses. In the AUTOSAR communication stack, the communication module (Com), diagnostic communication management module (Diagnostic Communication Manager, Dem), protocol data unit routing module (PduR), protocol data unit multiplexing module (I-PDU multiplexer, IpduM), bus-related transmission module (such as CanTp, FrTp, etc.), and communication and network management-related modules; the ECU abstraction layer is bus-related interface module (such as CanIf, LinIf, etc.); the microcontroller abstraction layer is bus-related driver module (such as Can, Lin, etc.)
The AUTOSAR communication stack hides the properties of bus-related protocols and packets from the application layer. Taking basic CAN communication as an example, its transmission mechanism is RTE->COM->PduR->CanIf->CAN Driver. The process description is as follows:
The Com module obtains the signal of the application layer and sends it to the PduR module after a certain processing and packages it into I-PDU (Interaction Layer Protocol Data Unit).
The I-PDU target receiving module specified in the PduR module routing protocol sends the received I-PDU to CanIf after a certain processing;
CanIf sends the signal to the CAN driver module in the form of L-PDU (Data Link Layer Protocol Data Unit)
2 Introduction to CAN communication protocol module
2.1 Com module
The Com module is located between the RTE and the PduR module in the runtime environment, and its main functions include:
Load the signal into the I-PDU and transmit it, and parse the signal from the received I-PDU;
Provides signal routing function to package the received I-PDU into the transmitting I-PDU;
Communication sending control (start/stop I-PDU group)
Send a requested reply, etc.
For each Com I-PDU, it is necessary to set the transmission direction (ComIPduDirection), signal processing method (ComIPduSignalProcessing), type (ComIPduSignalRef), I-PDU working group (ComIPduGroupRef), Com signal reference (ComIPduSignalRef), global PDU reference (ComPduIdRef), etc.
2.2 PduR module
The PduR module mainly provides I-PDU-based routing services for communication interface modules, transmission protocol modules, diagnostic communication management modules and communication modules. It plays a role in connecting the past and the future in the communication protocol stack, blocking network details for the upper-level service basic software modules and applications, so that the upper-level basic software modules and applications do not need to worry about running on which bus network. At the same time, the PduR module provides I-PDU-based gateway function, making communication between different buses possible.
2.3 CanIf module
The CAN interface layer (CanIf) is a standard interface for accessing the CAN bus. CanIf abstracts the location information of the CAN controller.It also provides a unified interface to the upper layer module to block the differences in the lower layer, that is, the upper layer does not need to care whether the CAN controller is an on-chip device or an off-chip device of the microcontroller.
The main functions of the CANIf module: complete the initialization of the global variables and configuration buffers in CanIf and the controller; send request service, provide an interface for the upper layer to send PDUs on the CAN network; send confirmation service, notify the upper layer after the sending is successful, or save it in the sending cache after the sending is cancelled; receive instructions service, notify the upper layer after the PDU is successfully received.
The CANIf module is mainly configured as a hardware object handle (Hardware object handle, Hoh), including Hth (Hardware transmit handle) and Hrh (Hardware receive handle), which need to refer to the CAN hardware objects defined in the Can module.
2.4 ComM module
Communication Manager (ComM) can simplify the initialization, network management, etc. of the bus communication stack, and can collect/coordinate bus communication access requests. It mainly provides three communication modes:
COMM_FULL_COMMUNICATION: FULL communication mode, this state can be received and sent
COMM_SILENT_COMMUNICATION:SILENT communication mode, this state can only be received
COMM_NO_COMMUNICATION:NO communication mode, this state cannot communicate
2.5 CanSM module
The CAN State Manager (CAN State Manager, CanSM) is responsible for implementing the abstraction of the CAN network control process. It provides an API for the ComM module to request the CAN network to switch communication modes.
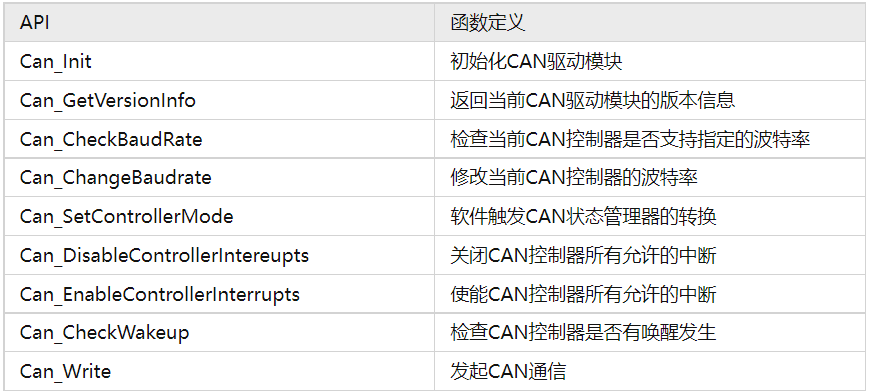
3 MCal Can module[2]
CAN Driver is a communication driver in the microcontroller abstraction layer. It is aimed at the CAN controller inside the microcontroller. It can realize functions such as initialization of the CAN controller, sending/receiving CAN messages, indicating the received messages, confirming the sent messages, wake-up detection, overflow and error handling. The CAN driver can access the hardware and provide an API independent of the hardware to the upper layer.
Intelligent Recommendation

Uncle Thorn's actual combat AUTOSAR - communication protocol stack configuration CAN_CANIF_PDUR_CANTP_COM_XCP_ECUC all in one go
The communication protocol stack is almost the most complicated part in CP AUTOSAR. Because it involves a lot of modules (only the realization of CAN signal transmission and reception requires the coo...
MODBUS communication protocol learning (1): Introduction to the protocol
table of Contents Preface Introduction to MODBUS protocol MODBUS communication format Information frame format Preface In the near future, we need to make a MODBUS/RTU to MODBUS/TCP gateway. First, yo...
The rookie-Autosar COM module and communication analysis-study notes
1. Architecture and terminology • PDU Router: PDU——Protocol Data Unit, protocol data unit. The function of this module is to distribute the signal data sent by COM to the correspondin...

[Classic AutoSar] [Storage Stack] (1)
table of Contents First, the storage stack consists of Second, the cause of non-disabled storage data in automotive electronics? Third, NVM-role Fourth, NVM-overview V. NVM-structure Sixth, NVM-basic ...

AUTOSAR NVM Introduction -- Part 1
Architecture Composition of NVRAM Block NV Data NVMDefinition object for tier memory used to manage and store non-volatile data。 NV Block Single Block stored in FEE/EA NV Block Header Cu...
More Recommendation

AUTOSAR OS Introduction -- Part 1
General AUTOSAR OS is derived from OSEK OS, and also meets the requirements of ISO-17356-3 for implementing an operating system. This article takes ETAS OS as an example to introduce Task All the func...

AUTOSAR SecOC Introduction -- Part 1
Introduction The role of AUTOSAR Secure Onboard Communication (SecOC) is to provide a mechanism to ensure the integrity and authentication of "important" data in the communication process be...

AUTOSAR Crypto Stack Introduction -- Part 4
Symmetric-key algorithms In the symmetric encryption algorithm, the data sender processes the plaintext (original data) and the encryption key together with a special encryption algorithm, turning it ...

AUTOSAR Crypto Stack Introduction -- Part 3
Algorithm Hash Algorithm Name Algorithm Input Length Output Length Reversible? MD5 Hash Any 128 bits No SHA -1 Hash Less 2^64 160 bits No SHA-224 Hash Less 2^64 224 bits No SHA-256 Hash Less 2^64 256 ...

Introduction to the TPM protocol stack and tools (1)
1. TPM related projects, there are several open source projects Address:https://github.com/tpm2-software 2. Tpm2-software contains a total of four projects tpm2-tools tpm2-tss tpm2-abrmd tpm2-tss-eng...