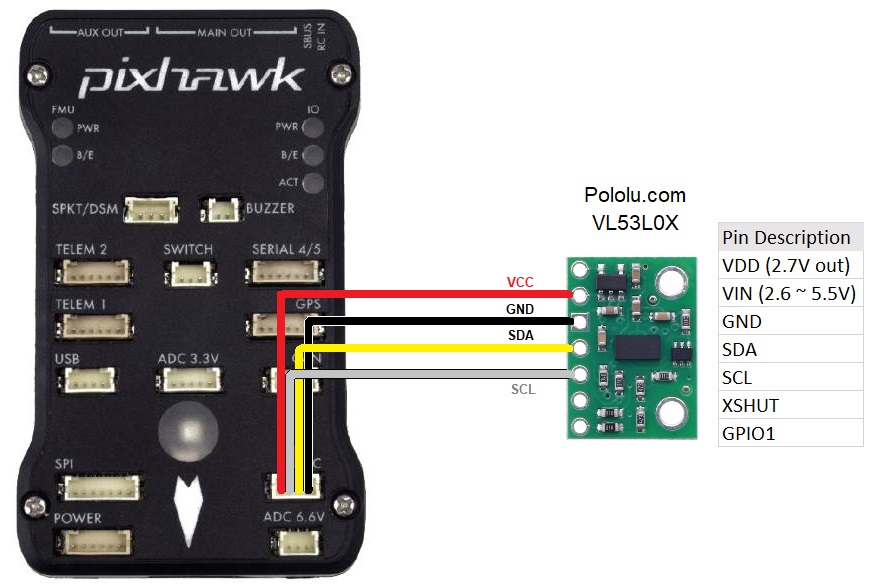
Pixhawk ardupilot module using a micro TOF ranging VL53L0X
tags: Pixhawk ardupilot Ranging module Avoidance Set high
Connection is as follows:



Intelligent Recommendation

Ardupilot pixhawk serial schematics learning
table of Contents Article Directory table of Contents Summary 1. Schematic learning 2.ardupilot latest code serial ports (3.6-chibios) 3.ardupilot official website to learn Summary This document recor...
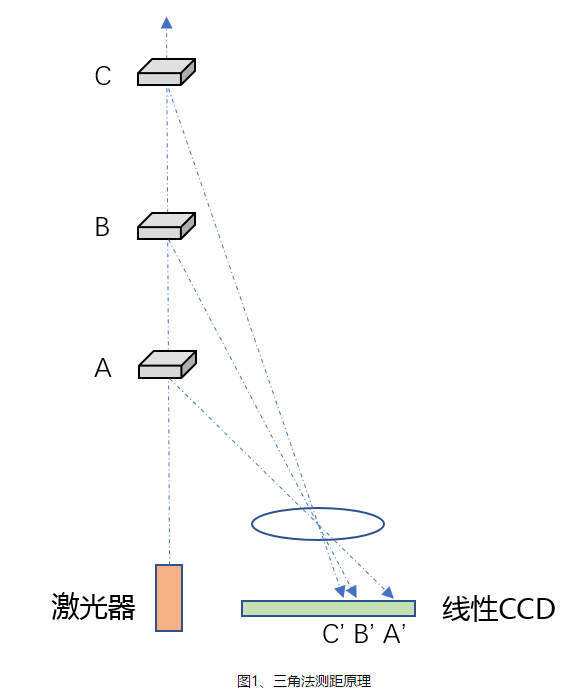
Triangular ranging radar and TOF lidar
Principle of Triangular Ranging Lidar The principle of triangulation is shown in the figure below. The laser emits laser light. After irradiating the object, the reflected light is recei...

Laser ranging mode interrupt source VL53L0X tested
Punctuality modified on atoms routine, the routine uses punctual atoms LCD, keys, like the AT24C02, get the hand can not directly use, I have deleted unnecessary, only the system board with a minimum ...
Use and code of laser ranging chip VL53L0X
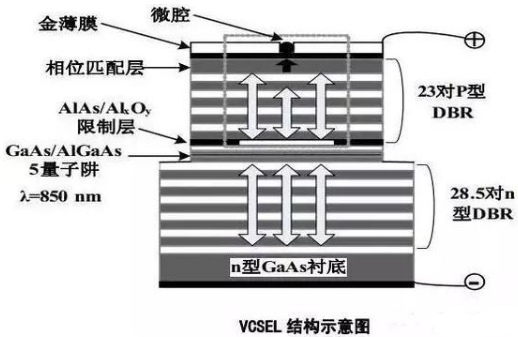
1. Introduction 1. Principle 940nm Vertical-Cavity Surface-Emitting Laser (VCSEL) is used to emit laser light. The laser hits an obstacle and is reflected back to be received by the VL53L0X. The laser...
The use of two VL53L0X laser ranging sensors
Two VL53L0X laser ranging sensors Preface Recently, the VL53L0x laser sensor is required to be ranging from the project, so that it is probably studied. Starting using a positive site atom, but two in...
More Recommendation

Pixhawk ardupilot mobile ground station DroidPlanner Tower
From: http://blog.sina.com.cn/s/blog_6266a8840102xp0f.html Tower supports most of the functions of the usual UAV ground stations, and is used for android phones, which is convenient to carry. software...
[Pixhawk] ArduPilot Source Code Windows Compile Tutorial
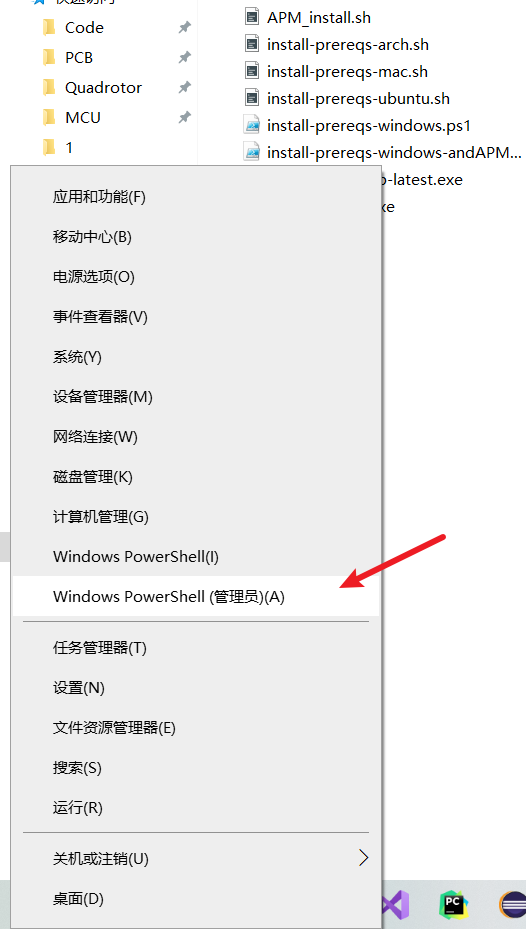
table of Contents First, establish a flying control firmware compilation environment 1.1 Get Flight Control Source Code 1.2 Run the Automation Profile using PowerShell 1.3 Installing the Future Librar...
Formula Derivation of TOF Ranging Method in UWB
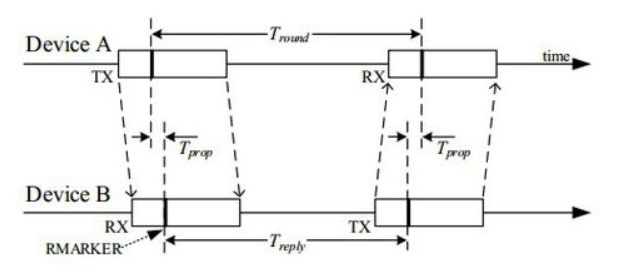
Formula Derivation of TOF Ranging Method in UWB There are two commonly used UWB ranging methods: time-of-flight ranging method (TOF) and time difference of arrival method (TDOA). Talk about TOF here. ...
Working Tournament - Record 2 ----- 4 VL53L0X laser ranging
Four VL53L0X laser ranging At the beginning, the laser ranging is still very much later, I have been finding information. I found that the two-way laser distances that I know that I saw a big revised ...

Pixhawk uses WiFi module
Pixhawk uses WiFi Preliminary preparation Brush firmware Install the brush firmware software Enter the brush firmware mode Download firmware Brush firmware use wiring Flight control parameter change I...