Super voxel data in point cloud
tags: PCL learning C++ Point cloud
Voxel data --------------------- voxelized grid
Voxel is the abbreviation of Volume pixel, which is the smallest unit of data located on a regular grid in three-dimensional space. The physical meaning of a voxel is similar to the promotion of two-dimensional image pixels in three-dimensional space. A group of uniformly distributed cubes in the center of an orthogonal grid. Voxels cannot represent position information in three-dimensional space, that is, they do not have three-dimensional coordinates. The three-dimensional information of the scene or the object can be represented by the relative position relationship of the voxel data in the stereo space.
1. First voxelize the point cloud data
Voxelization is the process of using voxels to approximate the spatial structure and geometry of a scene or object. The basic principle of voxelization is to create a three-dimensional grid on the input point cloud data. A three-dimensional grid is a collection of tiny three-dimensional cubes. Then, in each three-dimensional cube, the center of gravity of all point cloud data in the cube is used to approximate all points in the grid, and the corresponding voxel cloud data is obtained after the grid processing. The voxel cloud data can represent the surface geometric characteristics and internal attribute information of the model, and the relative positional relationship of the voxel data can also represent three-dimensional information.
The voxelization process is as follows:

Point cloud data is messy and unorganized, but after being processed by voxelization, there are three
topologies: 6 adjacency, 18 adjacency, and 26 adjacency. 6 adjacent two voxels have 6 common faces,
18 adjacent voxels have 12 common edges and 6 common faces, and 26 adjacent voxels have 8 on this basis
common point. As shown in Figure 3.3, from left to right are 6 adjacency, 18 adjacency and 26 adjacency.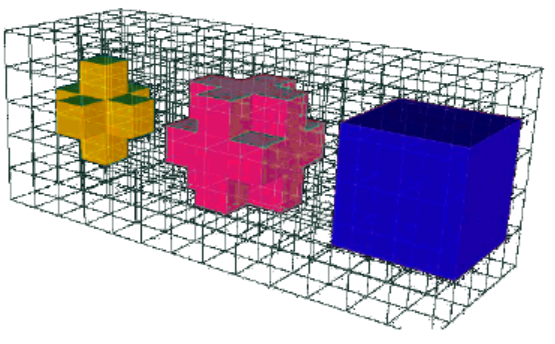
2. Obtain voxel cloud data after voxelization
The voxelization process first needs to establish a voxel space, which is similar to the pixel space of a two-dimensional image model. The range of the voxel space can be determined according to the maximum and minimum values of the point cloud data coordinates on the X, Y, and Z axes. Then, a fixed voxel resolution R is set, and the voxel space is based on the voxel resolution as the basic unit. The maximum bounding box under is divided to obtain a collection of tiny cubes of volume. The center point or centroid point in each cube can be used to represent the corresponding voxel cube, and the data set formed by all the center points or centroid points is voxel cloud data.
--------------------Super voxel data------------------------
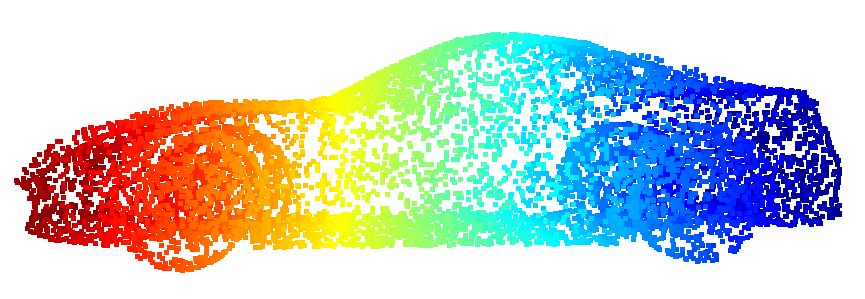
Supervoxel (Supervoxel) is a collection of voxel data, which is a subset of a three-dimensional grid of atomic volumes with certain semantic perception information in three-dimensional space, similar to superpixels on two-dimensional images. The super voxel is to generate irregularly shaped clusters based on the positional relationship or the similarity of other attributes. It is similar to the essence of voxels and is an irregular geometric body composed of voxels in three-dimensional space. Super voxels carry rich attribute information, for example, have spatial consistency, and are easier to manage than voxel data. A super voxel with good properties should have a relatively regular geometry and uniform voxel density, and it can be well attached to the boundary information.

Super voxel data representation of the scene
The process of acquiring super voxels is the clustering process of voxel data. The basic principle is to fuse voxel data that meets the similarity constraints in the local range, and divide the voxel cloud data according to similar attributes such as texture, color, normal, etc. It is the corresponding super voxel, used to study the relationship between voxel clusters, which is conducive to the subsequent classification and recognition work. This is similar to clustering pixels to get superpixels in the image segmentation process, and using the relationship of superpixels to segment and understand images. At present, super voxels have been widely used in research fields such as 3D data processing and video analysis, such as point cloud segmentation, target recognition, motion analysis and scene reconstruction.
Reference blog:PCL: Supervoxel data in point cloud
Intelligent Recommendation
Point cloud learning [1.3] voxel grid downsampling
Original point cloud random downsampling centroid downsampling...

Getting started with PCL using VOXEL sparse point cloud
When using PCL to process point clouds, many times we don't need too much resolution, because too many point clouds will make the calculation slower and consume more computing resources, so we need to...

Advanced understanding of 3D reconstruction - depth map, grid, voxel, point cloud
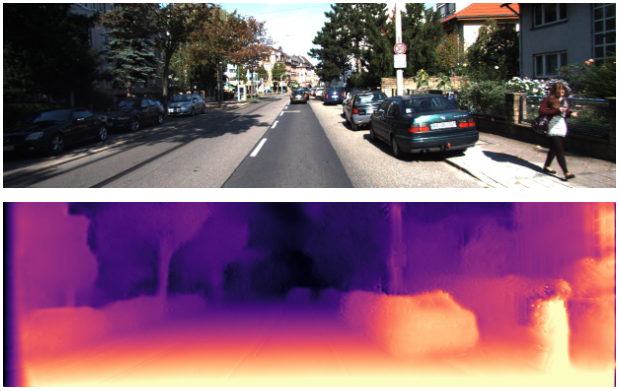
Depth map (Wikipedia) n 3D computer graphics a depth map is an image or image channel that contains information relating to the distance of the surfaces of scene objects from a viewpoint. Th...
PCL point cloud filtering: voxel mesh method Voxelgrid and applicable scene
table of Contents PCL Voxa Mesh Method VOXELGRID Usage and Point Cloud Effect Display Voxa mesh method Voxelgrid principle Description Applicable scenes and experience PCL Voxa Mesh Method VOXELGRID U...
More Recommendation
Several manifestations of 3D reconstruction—deep map, voxel, point cloud, mesh
Depth map The depth map is a2D pictures, Each pixel records the distance from the viewpoint to the occlusion surface (the occlusion is the shadow-generating object). The corresponding vertices of thes...
Point cloud learning project 1 (PCA dimensionality reduction, normal vector estimation, point cloud voxel and FPS filtering)
PCA dimensionality reduction, normal vector estimation Point cloud voxel and FPS filtering...
Getting started with ROS Point Cloud (1): Use the PCL's built-in Voxel Grid Filter to minimize the original point cloud.
The node subscribes to the "/ livox / lidar" topic point cloud data, using the PCL built-in Voxel Grid Filter to minimize the point cloud data, and the filtered results are released to "...

NeurIPS 2019 | Massachusetts and Shanghai Jiaotong University jointly proposed new point cloud processing framework Point-Voxel CNN
Paper: Point-Voxel CNN for Efficient 3D Deep Learning Source: NeurIPS2019 Spotlight A common make: Zhijian Liu (MIT), Haotian Tang (Shanghai Jiao Tong University) Code: https: //github.com/mit-han-lab...
Voxel raster downsampling the point cloud (from the basics)-source code analysis C ++
I. Introduction The so-calledDownsamplingIt is a kind of filtering on the point cloud, the purpose is to reduce the number of point clouds by keeping the original state of the point cloud as much as p...