Intel Realsense D435 python wrapper pyrealsense.points class (don’t know what it’s called)
# encoding: utf-8
# module pyrealsense2.pyrealsense2
# from D:\Yolov3_Tensorflow\python\lib\site-packages\pyrealsense2\pyrealsense2.cp36-win_amd64.pyd
# by generator 1.147
"""
LibrealsenseTM Python Bindings
==============================
Library for accessing Intel RealSenseTM cameras
"""
# imports
import pybind11_builtins as __pybind11_builtins
from .frame import frame
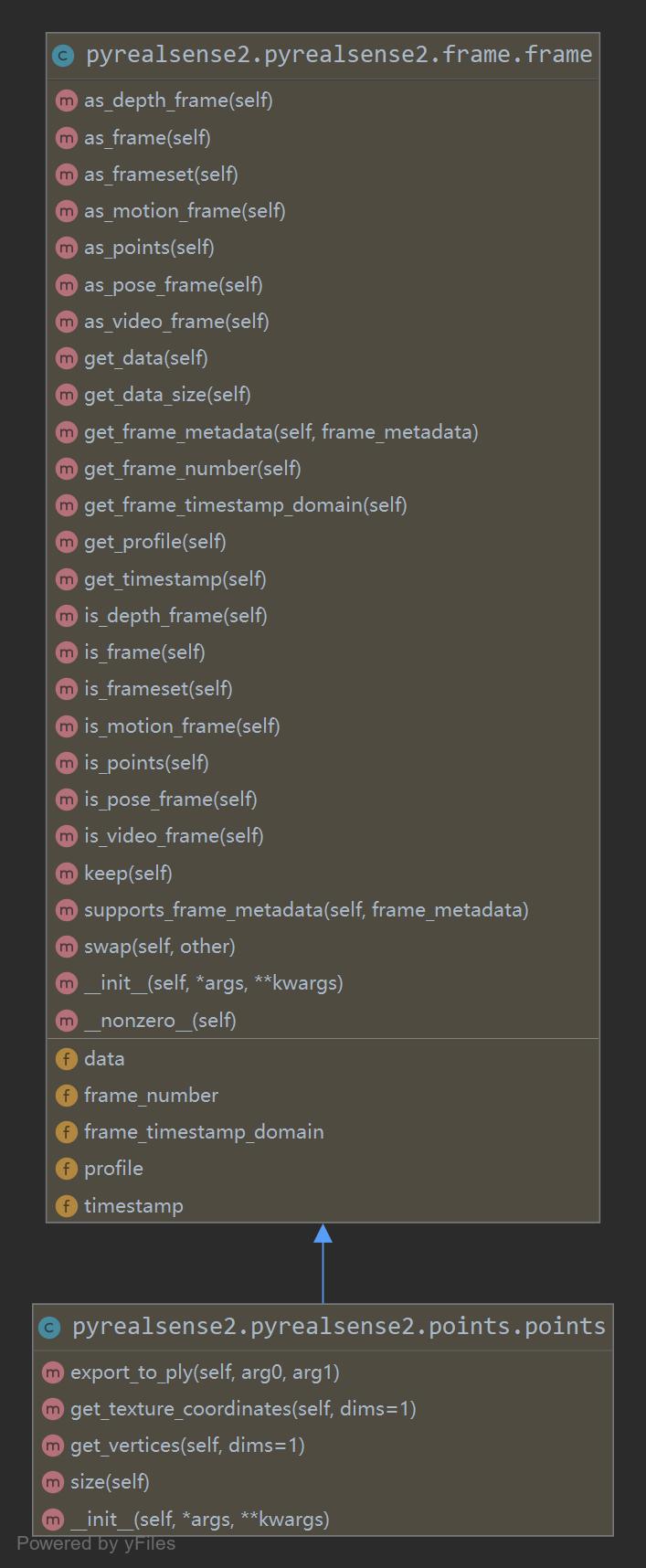
class points(frame):
"""
Extends the frame class with additional point cloud related attributes and functions.
Frame class extended with other attributes and functions related to point cloud.
"""
def export_to_ply(self, arg0, arg1): # real signature unknown; restored from __doc__
"""
export_to_ply(self: pyrealsense2.pyrealsense2.points, arg0: str, arg1: pyrealsense2.pyrealsense2.video_frame) -> None
Export the point cloud to a PLY file
Export point cloud to PLY file
"""
pass
def get_texture_coordinates(self, dims=1): # real signature unknown; restored from __doc__
"""
get_texture_coordinates(self: pyrealsense2.pyrealsense2.points, dims: int=1) -> pyrealsense2.pyrealsense2.BufData
Retrieve the texture coordinates (uv map) for the point cloud
Retrieve the texture coordinates of the point cloud (uv map)
"""
pass
def get_vertices(self, dims=1): # real signature unknown; restored from __doc__
"""
get_vertices(self: pyrealsense2.pyrealsense2.points, dims: int=1) -> pyrealsense2.pyrealsense2.BufData
Retrieve the vertices of the point cloud
Retrieve the vertices of a point cloud
"""
pass
def size(self): # real signature unknown; restored from __doc__
""" size(self: pyrealsense2.pyrealsense2.points) -> int """
return 0
def __init__(self, *args, **kwargs): # real signature unknown; restored from __doc__
"""
__init__(*args, **kwargs)
Overloaded function.
1. __init__(self: pyrealsense2.pyrealsense2.points) -> None
2. __init__(self: pyrealsense2.pyrealsense2.points, arg0: pyrealsense2.pyrealsense2.frame) -> None
"""
pass
Intelligent Recommendation
Intel Realsense D435 python (Python Wrapper)example05: Realsense Backend
example05: Realsense Backend https://github.com/IntelRealSense/librealsense/blob/development/wrappers/python/examples/pybackend_example_1_general.py Example of controlling devices using the backend in...
Intel Realsense D435 python (Python Wrapper)example02: NumPy and OpenCV(242)
example02: NumPy and OpenCV https://github.com/IntelRealSense/librealsense/blob/development/wrappers/python/examples/opencv_viewer_example.py Example of rendering depth and color images using the help...
More Recommendation
Intel Realsense D435 python (Python Wrapper)example00: NumPy Integration(241)
NumPy Integration: Librealsense frames support the buffer protocol. A numpy array can be constructed using this protocol with no data marshalling overhead: The depth of the frame data is converted Num...
Intel Realsense D435 python (Python Wrapper)example03: Stream Alignment(246)
https://github.com/IntelRealSense/librealsense/blob/development/wrappers/python/examples/align-depth2color.py Demonstrate a way of performing background removal by aligning depth images to color image...
Intel Realsense D435 python (Python Wrapper)example07:Box Dimensioner Multicam
example07:Box Dimensioner Multicam https://github.com/IntelRealSense/librealsense/blob/development/wrappers/python/examples/box_dimensioner_multicam/box_dimensioner_multicam_demo.py Simple demonstrati...